Роботы: То, о чем давно мечтали... робот Dextrous Blue рассортирует белье
12 мая 2015 00:40 #15370
от ICT
 Робота учат понимать динамику и возможности взаимодействия с различными ткаными материалами. В отличие от "привычных" для промышленных роботов твердых предметов, ткани могут свободно болтаться, что усложняет для робота задачу распознования - что за предмет он держит в манипуляторе?
Робота учат понимать динамику и возможности взаимодействия с различными ткаными материалами. В отличие от "привычных" для промышленных роботов твердых предметов, ткани могут свободно болтаться, что усложняет для робота задачу распознования - что за предмет он держит в манипуляторе?
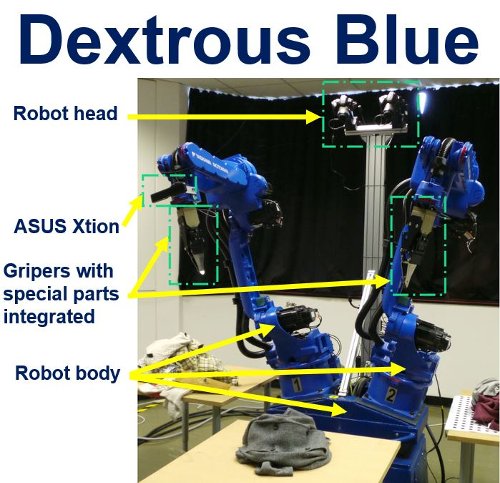
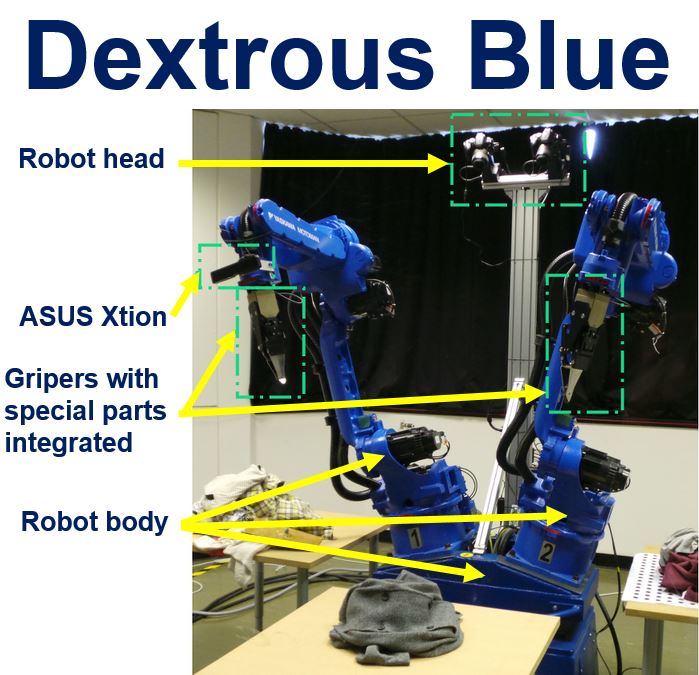
В голове робота - две камеры Nikon DSLR (D5100), обеспечивающие ему два потока информации с разрешением 16 мпикс. Камеры установлены на платформах PTU-D46 с возможностью наклона и панорамирования с соответствующими контроллерами. Расстояние между объективами камер выбрано таким, чтобы обеспечить формирование оптимальной стерео-картинки. Робот "смотрит" на рабочее пространство сверху, система искуственного зрения формирует трехмерное "облако точек", составляющих объект, который робот должен распознать.
В распознавании также задействованы акустические сенсоры в манипуляторах робота. Одежда из разных тканей издает различные звуки, пока робот вертит их в руках. Эта информация используется системой распознавания наряду с полученной от камер.
Проект CloReMa - это сокращение от Clothes Perception and Manipulation. Распознавание и манипуляция предметами одежды. На видео показан процесс сортировки белья "из кучи" на темное, белое и цветное.
Выглядит процесс неплохо, вот только в реальности робот пока что работает втрое медленнее, чем показано на видео. С другой стороны, он не отдыхает и не спит, так что возможно это все равно хорошее решение. По крайней мере потенциально.
++
Энциклопедия роботов на MForum.ru
Новости роботов на Facebook.com
источник: marketbusinessnews.com
++ Ссылка на источник
В голове робота - две камеры Nikon DSLR (D5100), обеспечивающие ему два потока информации с разрешением 16 мпикс. Камеры установлены на платформах PTU-D46 с возможностью наклона и панорамирования с соответствующими контроллерами. Расстояние между объективами камер выбрано таким, чтобы обеспечить формирование оптимальной стерео-картинки. Робот "смотрит" на рабочее пространство сверху, система искуственного зрения формирует трехмерное "облако точек", составляющих объект, который робот должен распознать.
В распознавании также задействованы акустические сенсоры в манипуляторах робота. Одежда из разных тканей издает различные звуки, пока робот вертит их в руках. Эта информация используется системой распознавания наряду с полученной от камер.
Проект CloReMa - это сокращение от Clothes Perception and Manipulation. Распознавание и манипуляция предметами одежды. На видео показан процесс сортировки белья "из кучи" на темное, белое и цветное.
Выглядит процесс неплохо, вот только в реальности робот пока что работает втрое медленнее, чем показано на видео. С другой стороны, он не отдыхает и не спит, так что возможно это все равно хорошее решение. По крайней мере потенциально.
++
Энциклопедия роботов на MForum.ru
Новости роботов на Facebook.com
источник: marketbusinessnews.com
++ Ссылка на источник
Пожалуйста Войти или Регистрация, чтобы присоединиться к беседе.
Похожие статьи
| Тема | Релевантность | Дата |
|---|---|---|
| Роботы: Робот-анастезиолог Sedasys. Вы готовы? | 13.52 | Суббота, 16 мая 2015 |
| Роботы: Робот для сборки земляники - готовится второй прототип | 13.23 | Суббота, 16 мая 2015 |
| Роботы: Промышленные роботы бьют рекорды продаж - плюс 27% в 2014 году | 10.46 | Понедельник, 04 мая 2015 |
| Жители подмосковного Чехова сушат белье на кабеле интернет-провайдера | 9.64 | Вторник, 30 июня 2020 |
| Huawei уже давно взялась за 6G | 9.36 | Пятница, 27 сентября 2019 |
| Для забывчивых: Samsung анонсировала стиральную машину, в которую можно добавить белье после запуска стирки | 9.25 | Понедельник, 07 сентября 2015 |
| Москвичи ушли в онлайн, но регионы давно там | 9.15 | Среда, 27 июля 2022 |
| Blue Origin 20 . | 8.78 | Среда, 05 мая 2021 |
| Blue Origin "" | 8.78 | Четверг, 20 мая 2021 |
| Blue Origin 14- New Shepard () | 8.69 | Пятница, 15 января 2021 |